Adversarial Exploitation in Robot Vision-Language Navigation
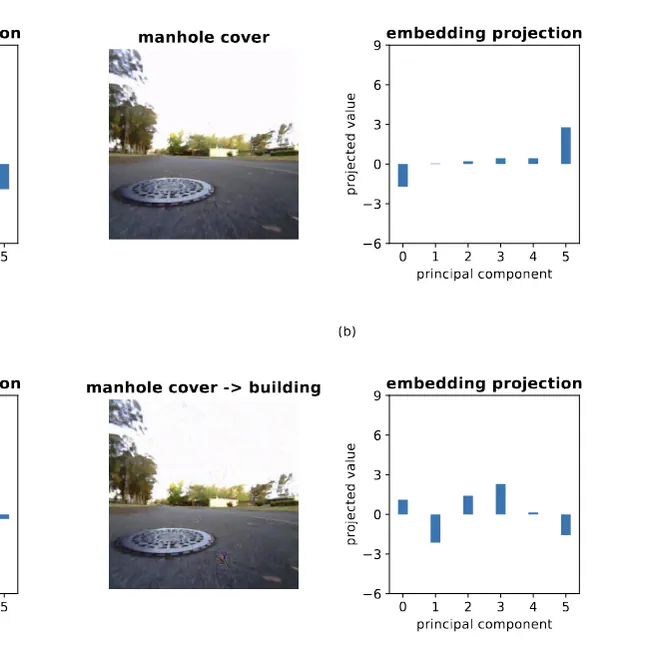
Developed a novel algorithm to adversarially modify images, exploiting the semantic representation gaps in vision-language models, enabling controlled redirection of robot navigation paths through minimal image alterations. Improved security through a detection mechanism sensitive to noise in manipulated images.
Mar 15, 2024